











Mô Tả Sản Phẩm
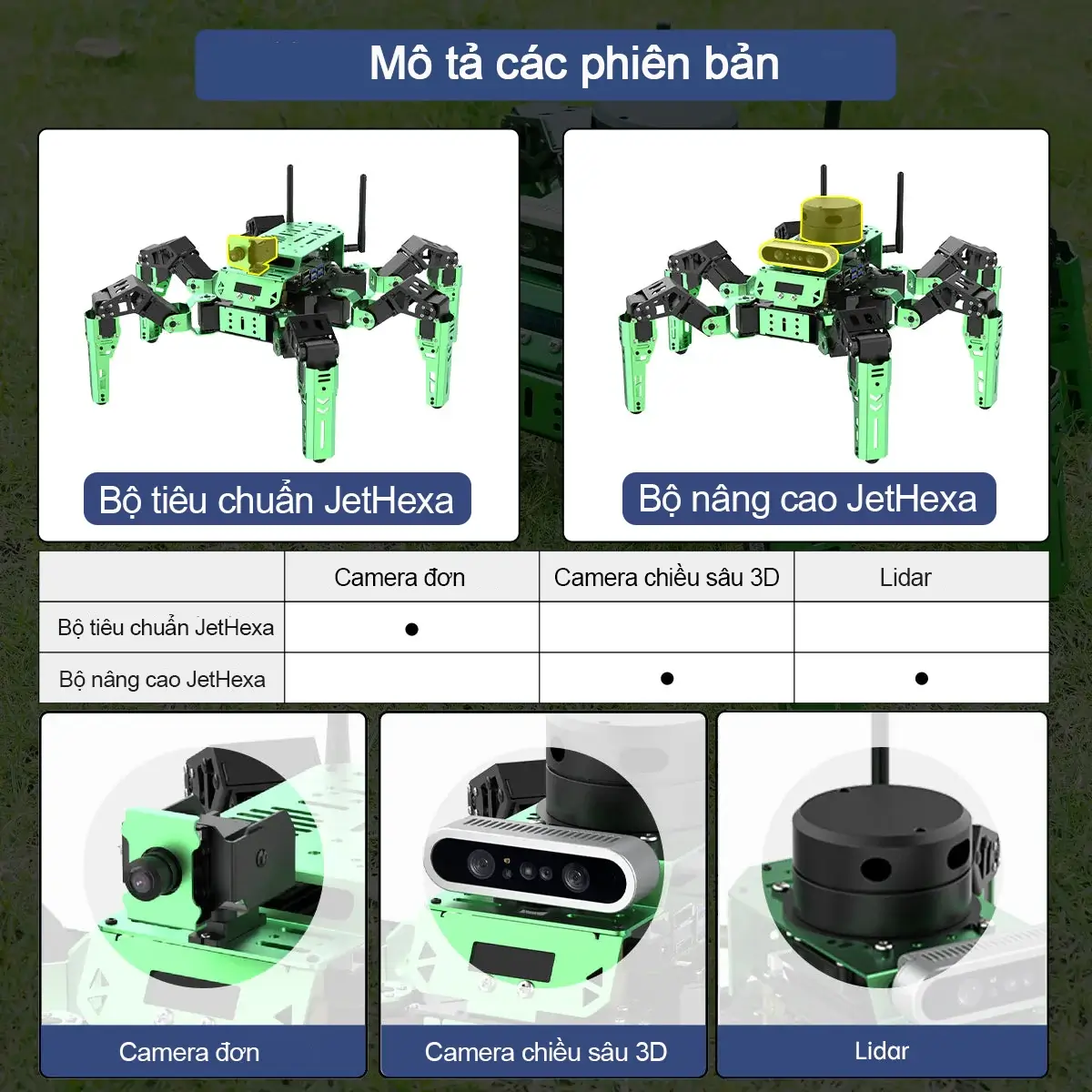
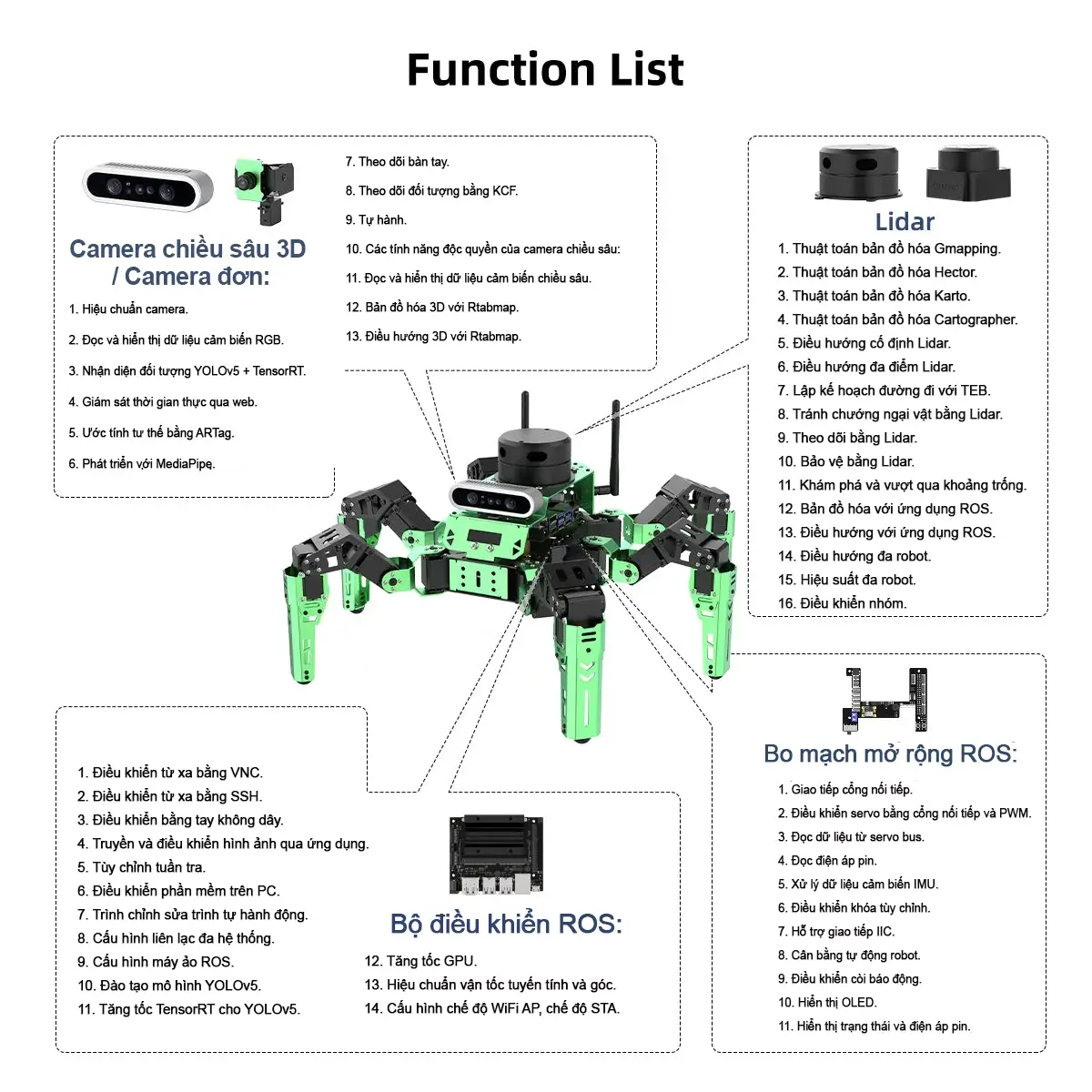
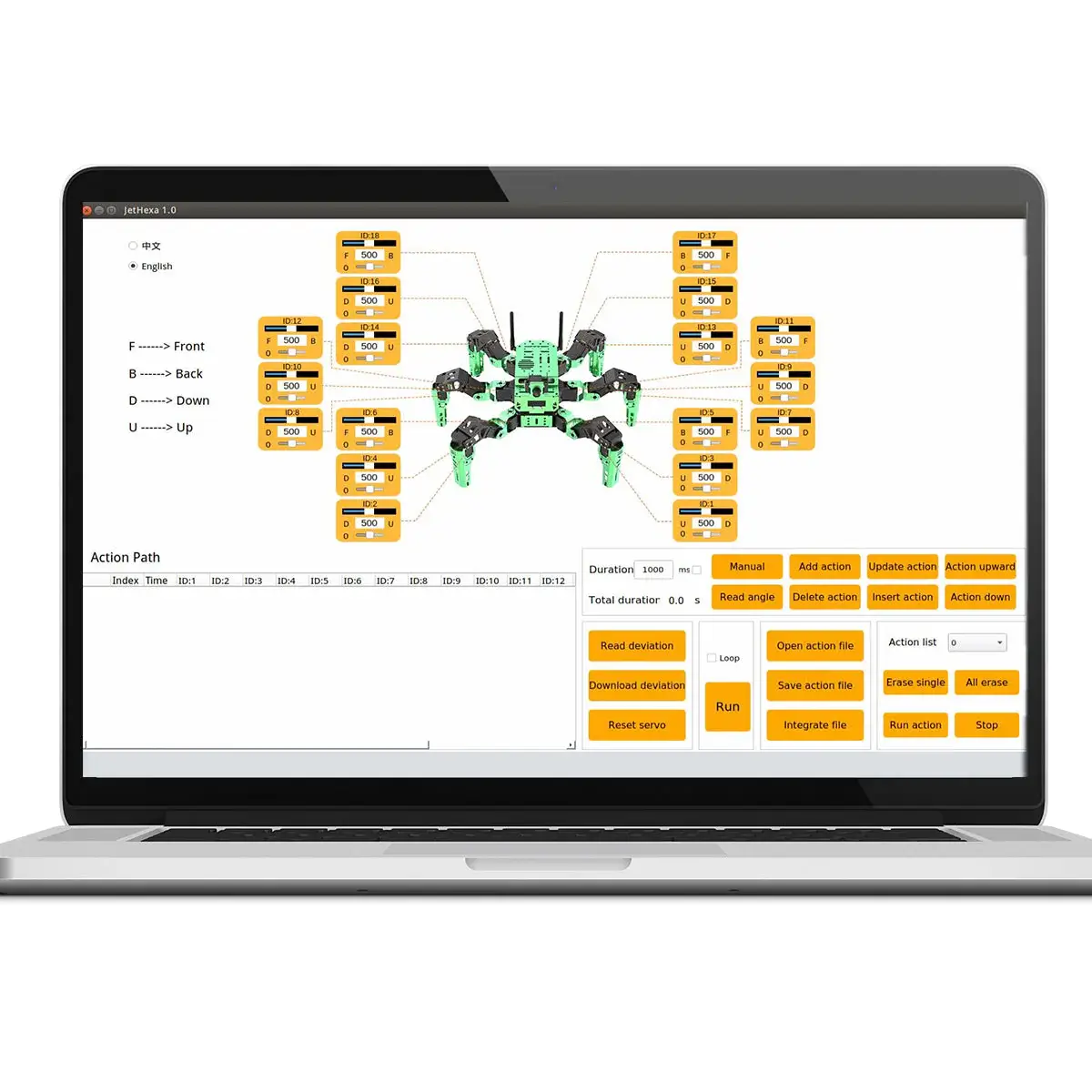
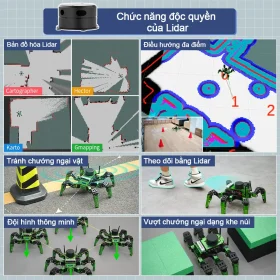
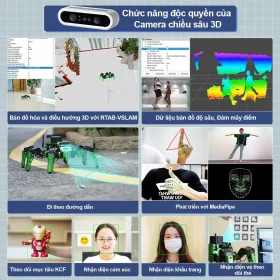
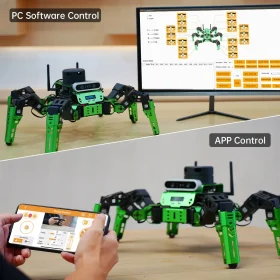
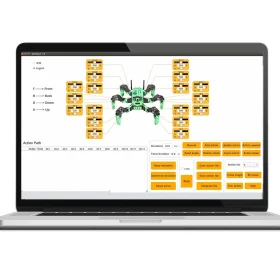
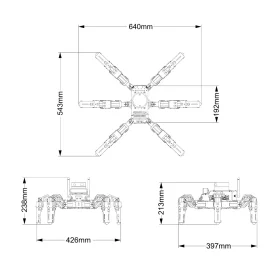
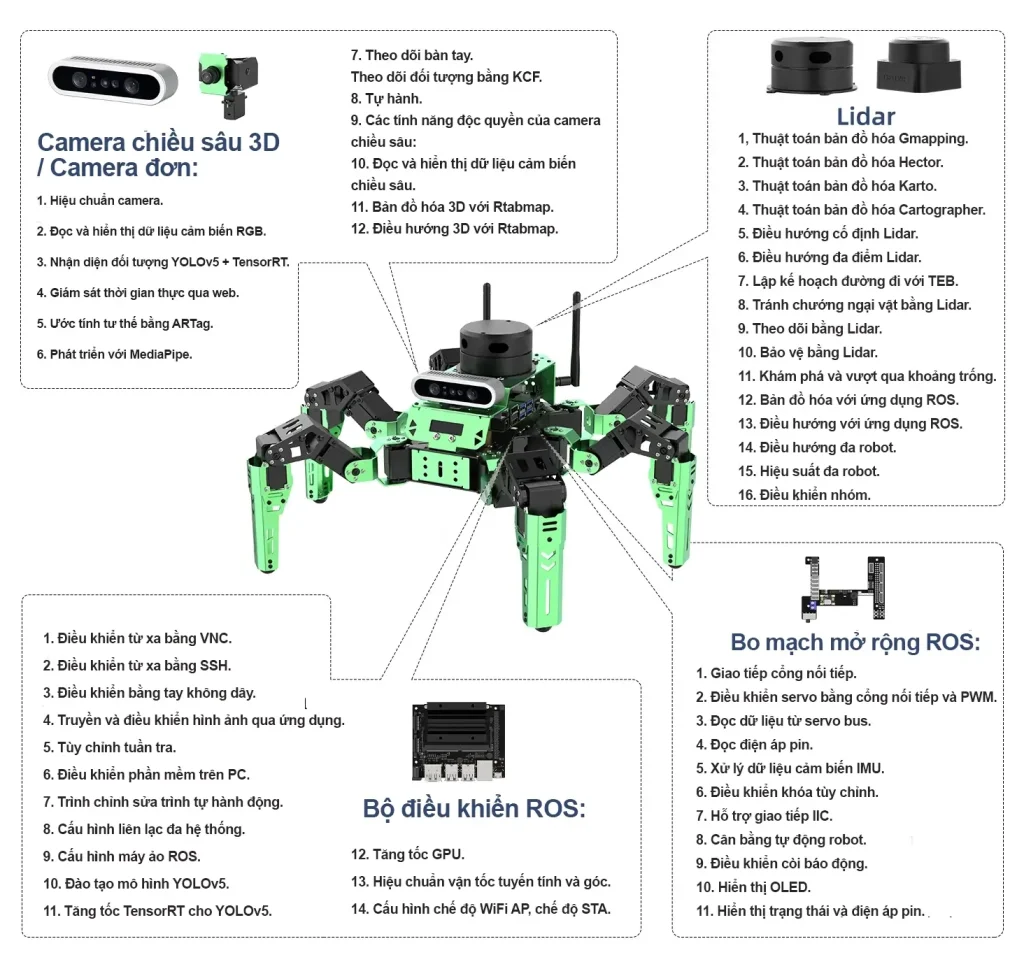
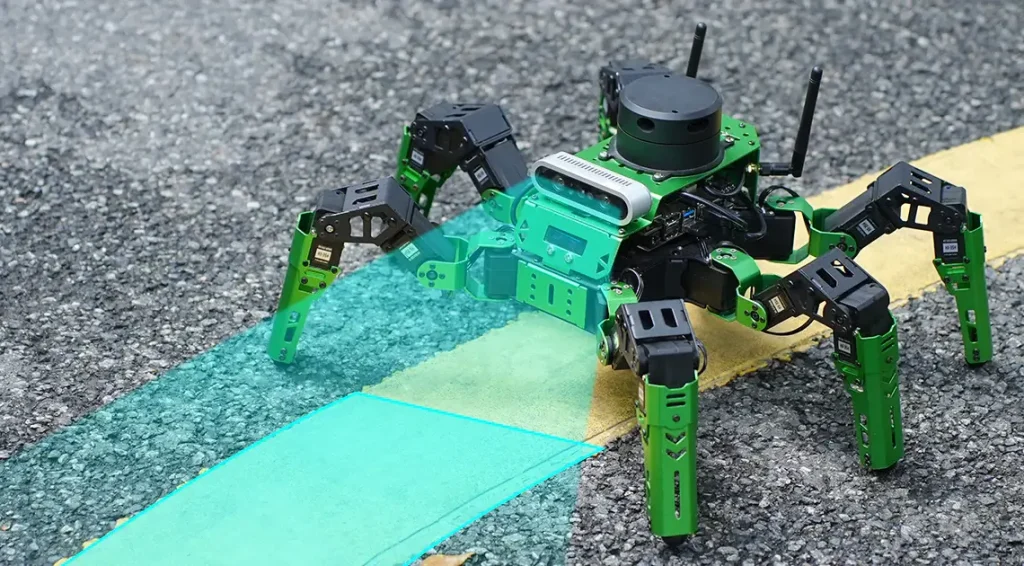
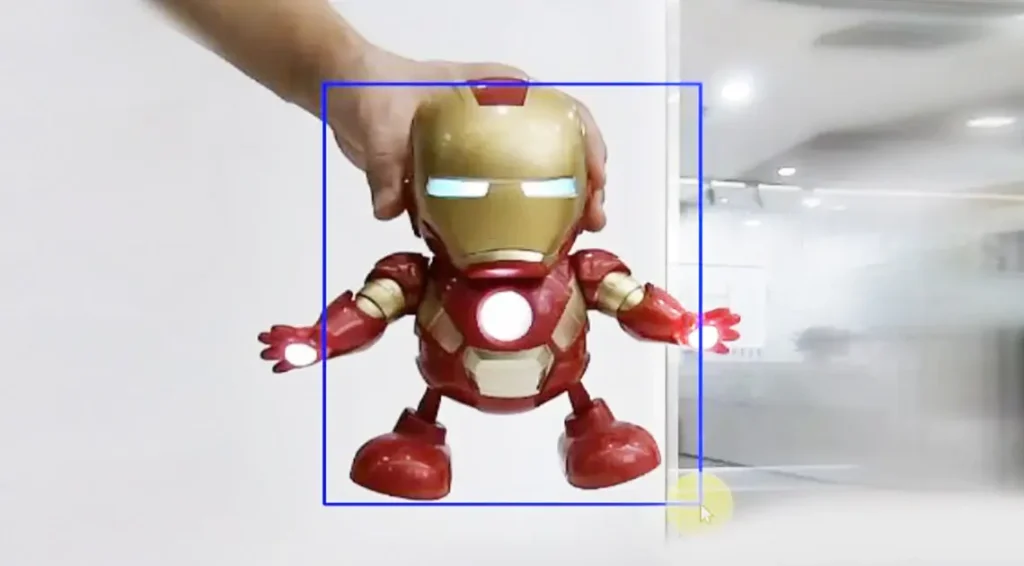
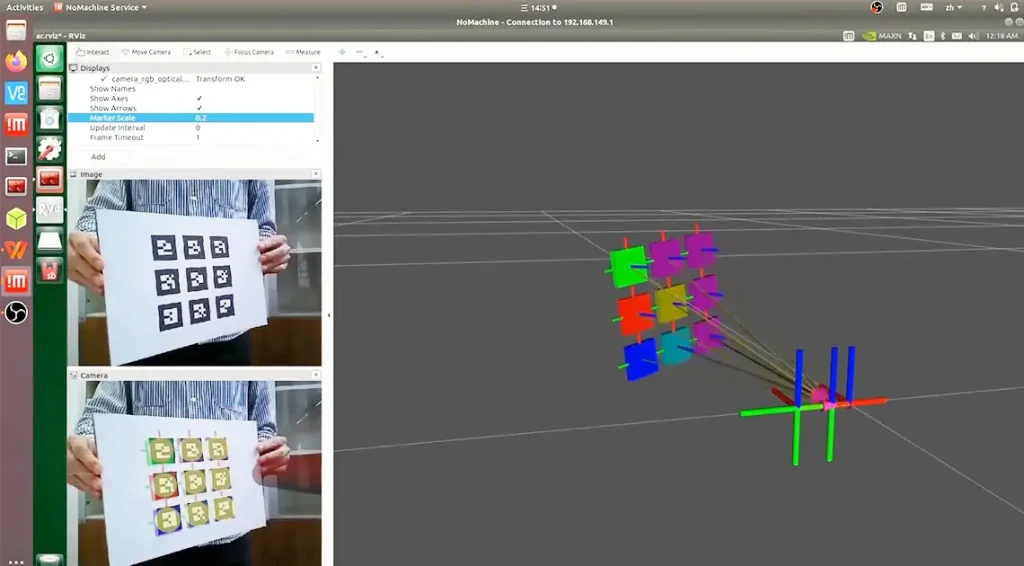
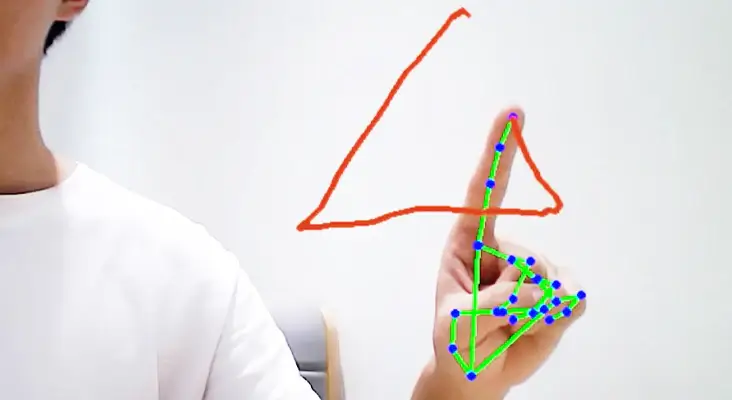
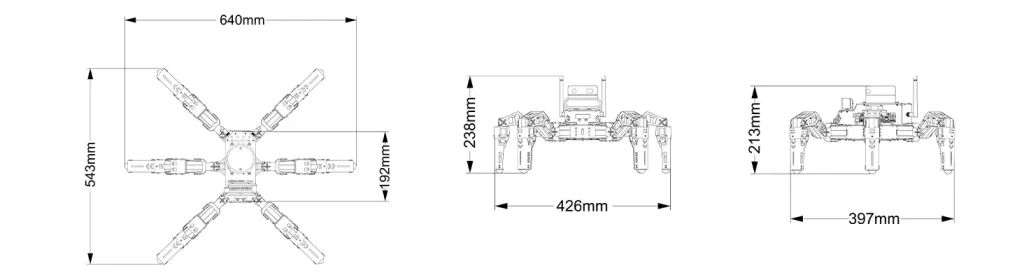
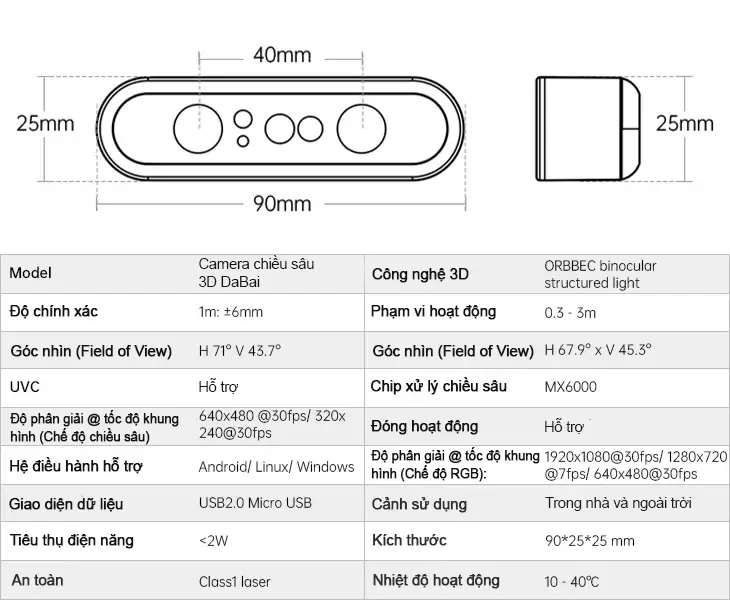
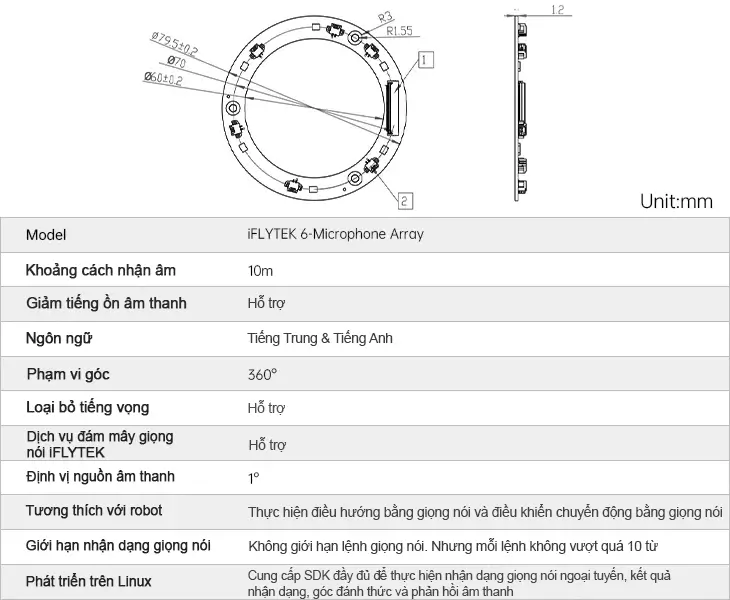
JetHexa là một robot sáu chân được trang bị NVIDIA Jetson Nano và hỗ trợ Hệ điều hành Robot (ROS). Robot này tận dụng các framework học sâu phổ biến, sử dụng OpenCV để xử lý hình ảnh, tích hợp phát triển MediaPipe, cho phép huấn luyện mô hình YOLO và ứng dụng tăng tốc TensorRT.


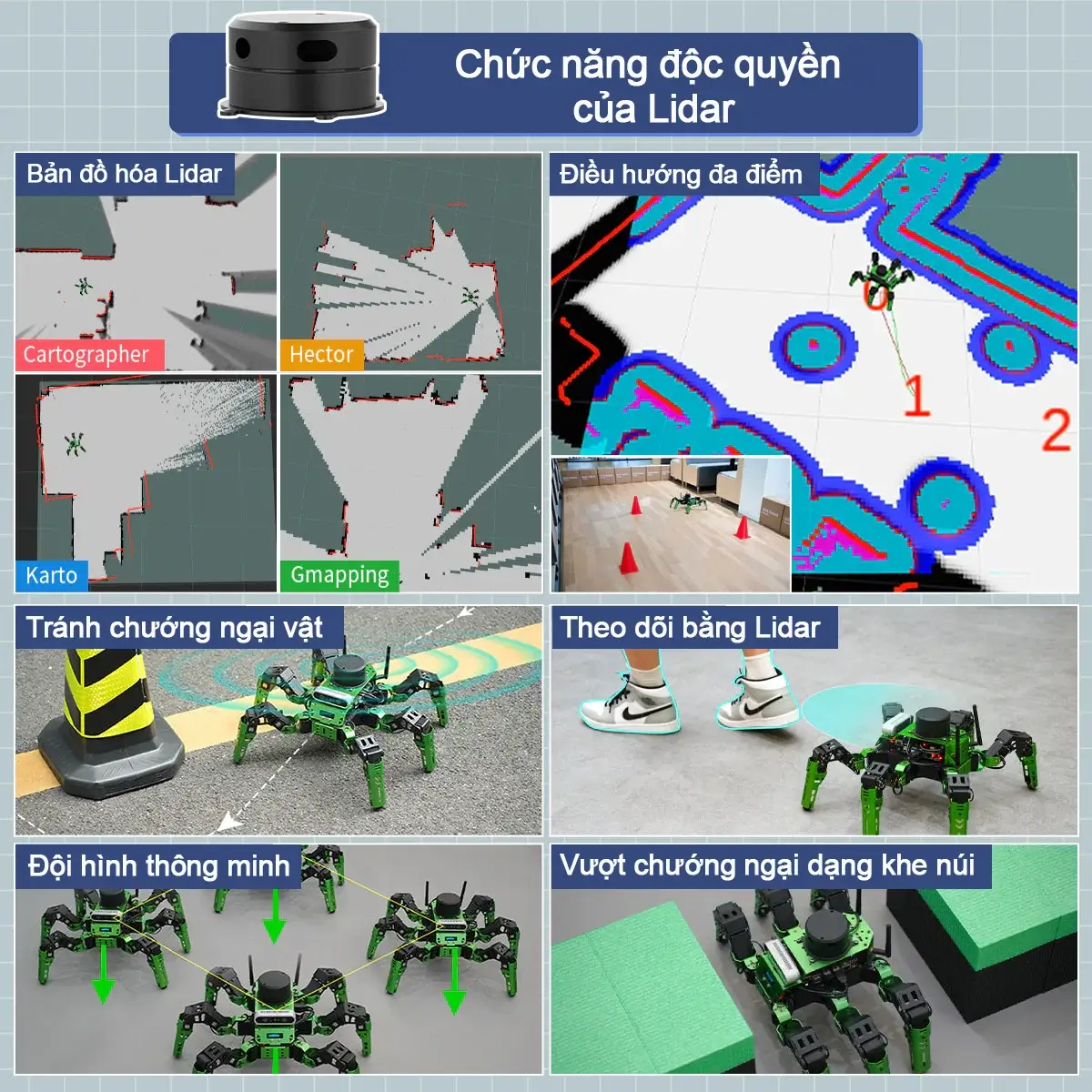
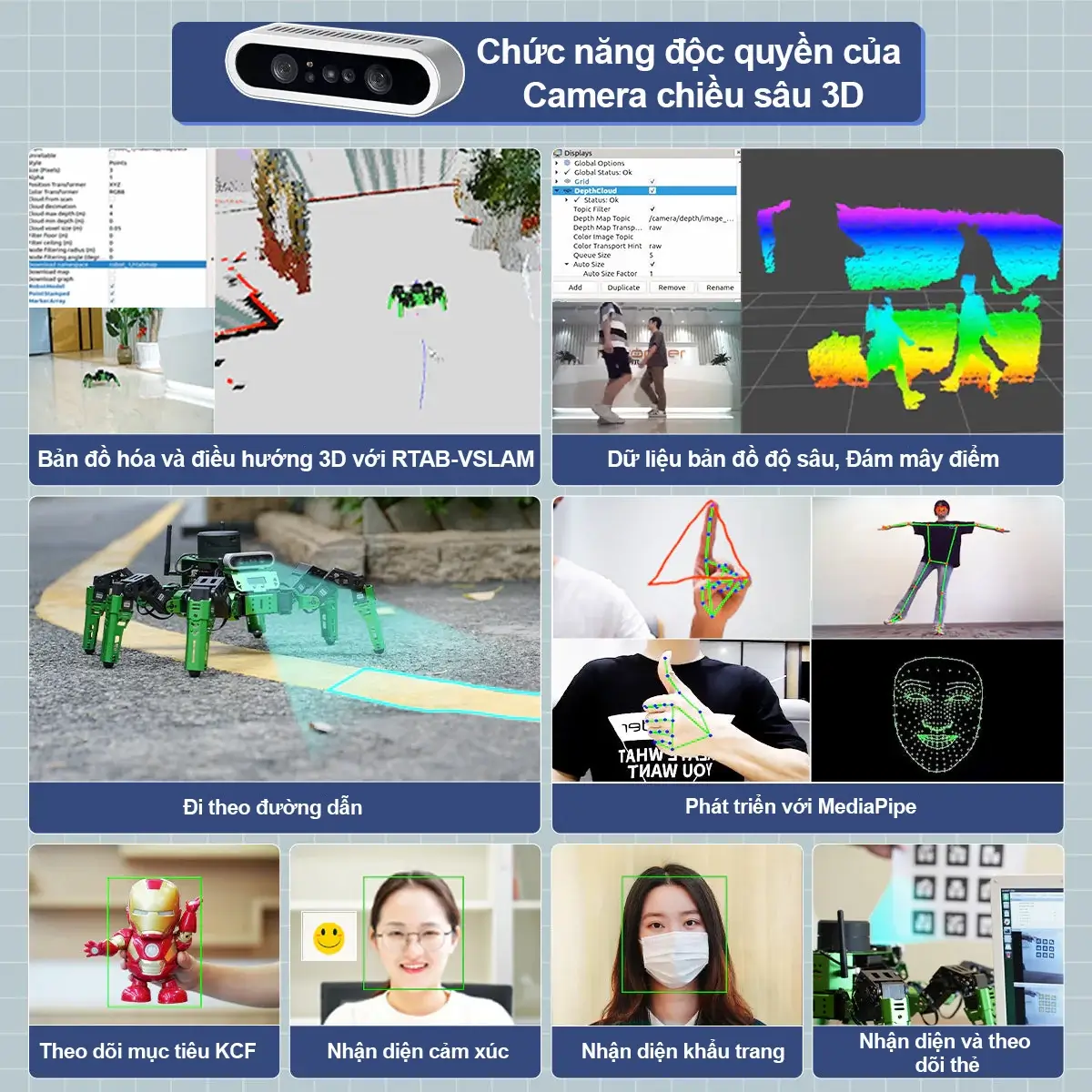
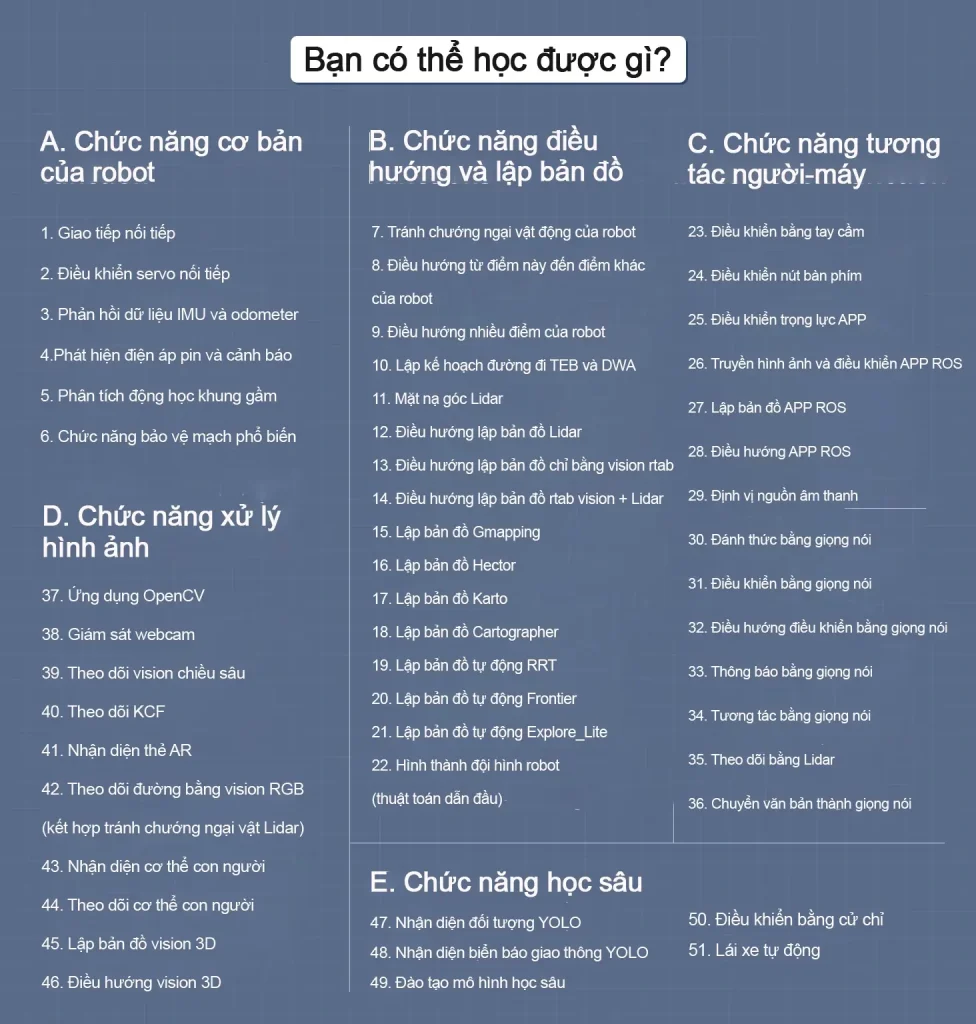
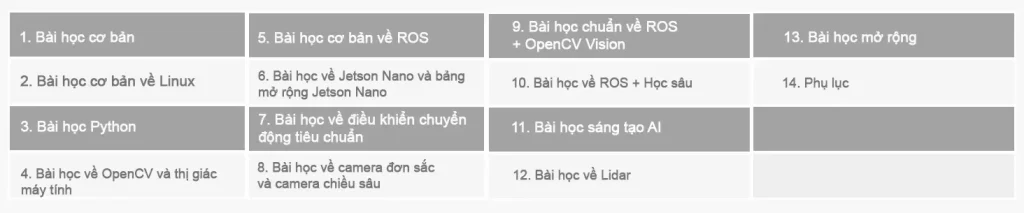
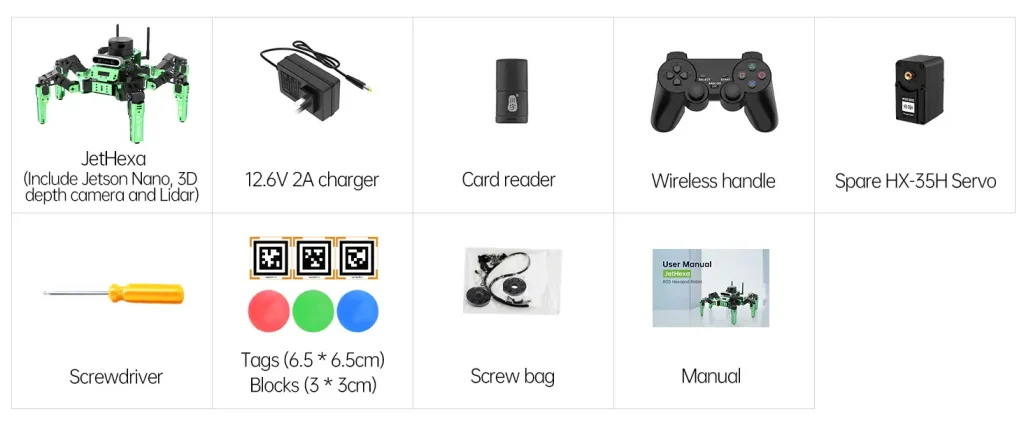
Danh sách Chức năng


















Chưa có đánh giá nào.